
 基于磁场驱动的无线微型软体机器人应用.docx
基于磁场驱动的无线微型软体机器人应用.docx
《基于磁场驱动的无线微型软体机器人应用.docx》由会员分享,可在线阅读,更多相关《基于磁场驱动的无线微型软体机器人应用.docx(2页珍藏版)》请在第一文库网上搜索。
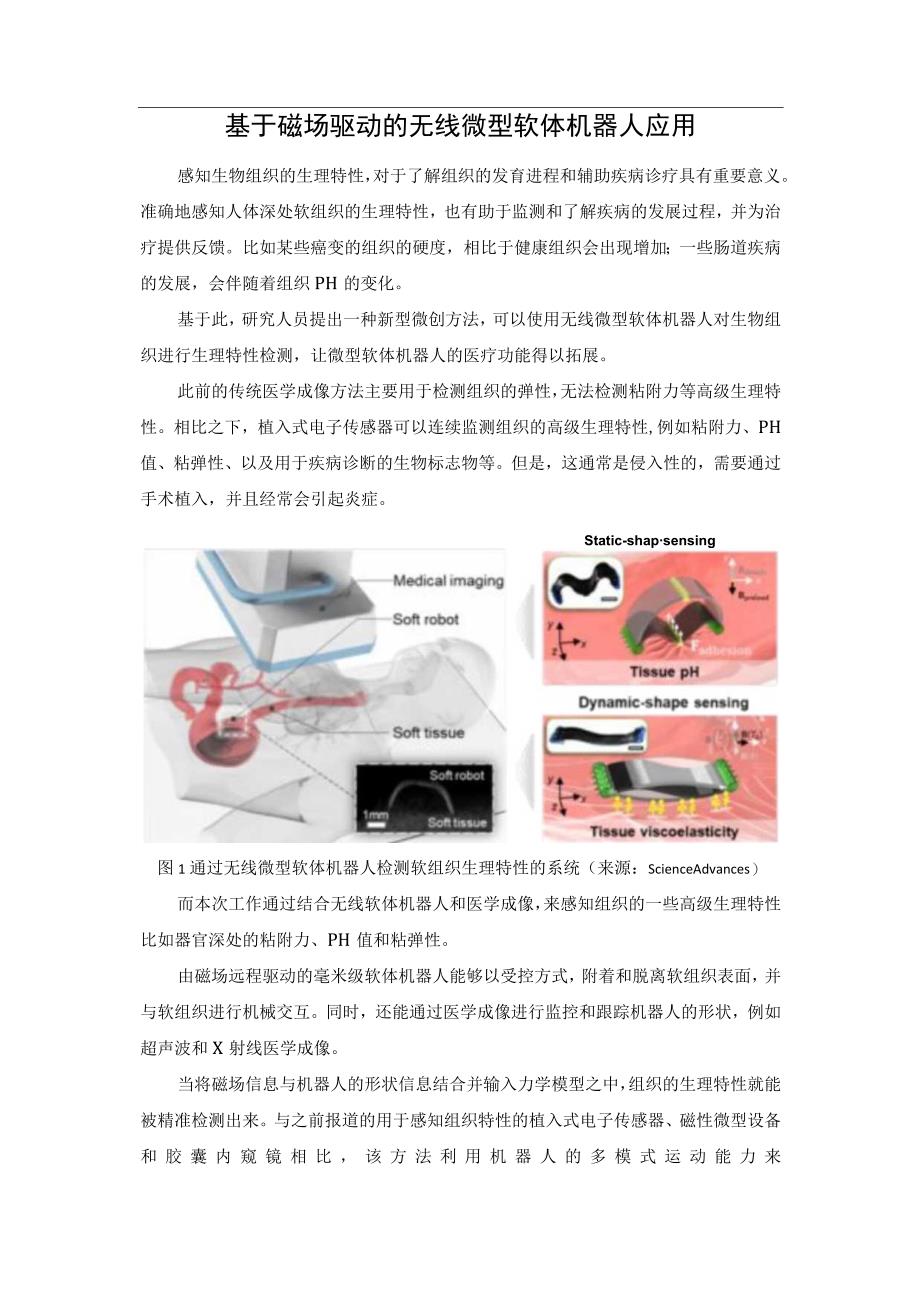
1、基于磁场驱动的无线微型软体机器人应用感知生物组织的生理特性,对于了解组织的发育进程和辅助疾病诊疗具有重要意义。准确地感知人体深处软组织的生理特性,也有助于监测和了解疾病的发展过程,并为治疗提供反馈。比如某些癌变的组织的硬度,相比于健康组织会出现增加;一些肠道疾病的发展,会伴随着组织PH的变化。基于此,研究人员提出一种新型微创方法,可以使用无线微型软体机器人对生物组织进行生理特性检测,让微型软体机器人的医疗功能得以拓展。此前的传统医学成像方法主要用于检测组织的弹性,无法检测粘附力等高级生理特性。相比之下,植入式电子传感器可以连续监测组织的高级生理特性,例如粘附力、PH值、粘弹性、以及用于疾病诊断
2、的生物标志物等。但是,这通常是侵入性的,需要通过手术植入,并且经常会引起炎症。Static-shapsensing图1通过无线微型软体机器人检测软组织生理特性的系统(来源:ScienceAdvances)而本次工作通过结合无线软体机器人和医学成像,来感知组织的一些高级生理特性比如器官深处的粘附力、PH值和粘弹性。由磁场远程驱动的毫米级软体机器人能够以受控方式,附着和脱离软组织表面,并与软组织进行机械交互。同时,还能通过医学成像进行监控和跟踪机器人的形状,例如超声波和X射线医学成像。当将磁场信息与机器人的形状信息结合并输入力学模型之中,组织的生理特性就能被精准检测出来。与之前报道的用于感知组织特


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 基于 磁场 驱动 无线 微型 软体 机器人 应用
 第一文库网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
第一文库网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 调和油系列产品项目可行性研究报告.doc
调和油系列产品项目可行性研究报告.doc
-
三相调压器项目可行性研究报告.doc
-
可行性分析报告设立XX基金管理公司项目可行性分析报告.doc
-
丁硅料项目可行性研究报告.doc
-
二手车交易市场建设项目可行性研究报告.doc
-
二手车交易市场项目可行性研究报告.doc
-
二万头商品猪项目可行性研究报告大纲2.doc
-
二氢松油醇项目可行性研究报告.doc
-
二氧化钛项目可行性研究报告.doc
-
二位五通电磁换向阀项目可行性研究报告.doc
-
二聚酸项目可行性研究报告.doc
-
从化项目可行性报告XXXX329.doc
-
二氧化碳回收项目可行性研究报告.doc
-
水性油墨工程技术研发中心项目可行性研究报告.doc
-
水杀菌消毒项目可行性研究报告.doc
-
水稻种植及加工产业化项目可行性报告.docx
-
水暖五金配件项目可行性研究报告.doc
-
汽车行业-汽车教学整车模型项目可行性研究报告.doc
-
汽车行业-汽车电机零部件项目可行性研究报告.doc
-
汽车行业-汽车空调压缩机支架项目可行性研究报告.doc
-
汽车行业-汽车轮钢项目可行性研究报告摩森咨询·专业编写可行性.doc
-
水果筛选项目可行性研究报告.doc
-
水质改良剂项目可行性研究报告.doc
-
汽车行业-汽车空调电器总成项目可行性研究报告.doc
-
汽车行业-汽车钢卷项目可行性研究报告.doc
-
水泥厂项目可行性研究报告.docx
-
江苏省某幼儿园学校配套停车场项目建议书(代可行性研究报告).docx
-
水泥预制件墙板项目可行性研究报告.doc
-
江西省金韵生态农业示范园建设项目可行性研究报告页(1).docx
-
汽车行业-汽车美容护理用品项目可行性研究报告.doc
-
汽车行业-汽车轮胎套筒项目可行性研究报告.doc
-
汽车行业-汽车阀门项目可行性研究报告.doc
-
高通上季度业绩超预期.docx
-
高铁救援疏散通道施工方案.docx
-
鲜于枢楷书跋神龙兰亭序.docx
-
鲁JJ045基槽验线记录.docx
-
鸡肉中胆固醇测定的不确定度评定.docx
-
鲤疱疹病毒Ⅱ型ORF4蛋白在杆状病毒表达系统中的表达及其免疫原性分析.docx
-
高校大型仪器设备维修管理研究.docx
-
高校学生观看望道心得体会.docx
-
高校毕业生灵活就业社会保险补贴申请认定表.docx
-
高校辅导员考试基本知识(一).docx
-
高温危害检测与分级.docx
-
高空作业安全管理制度参考借鉴范本.docx
-
高职体育教育教学分析.docx
-
高校行政绩效考核与薪酬管理浅谈.docx
-
高温作业安全制度.docx
-
高科技让判罚更精准.docx
-
高职体育教学改革的创新与实践探讨.docx
-
高校大学致全体同学反诈骗的一封信.docx
-
高职院校教师专业发展的三维模型及其应用.docx

