
 双横臂悬架设计.docx
双横臂悬架设计.docx
《双横臂悬架设计.docx》由会员分享,可在线阅读,更多相关《双横臂悬架设计.docx(12页珍藏版)》请在第一文库网上搜索。
1、5. 7双横臂式悬架设计5.7.1双横臂悬架的结构与力学模型简化图5. 7.1某货车的双横臂前悬架图5. 7. 1采纳前置转向梯形的货车的前悬架。一根横梁用作副车架,通过螺栓连接在车架下方。弹簧、限位块、减振器和两对横臂支承在横梁这一 “受力中心”上。只有横向稳定杆、转向器、转向直拉杆和下横臂的拉杆固定在车架纵梁上。拉杆前部支承着一个具有纵向弹性的橡胶支座。该支座缓和带束轮胎的纵向刚度。双横臂式悬架的主要优点在于其运动规律的可设计性。依据横臂的相互位置,即角度和的大小,可定出侧倾中心和纵倾中心的高度,转变横臂长度,还会影响上下跳动的车轮的角运动,即车轮的外倾角变化和(在极限状况下)与此相关的轮
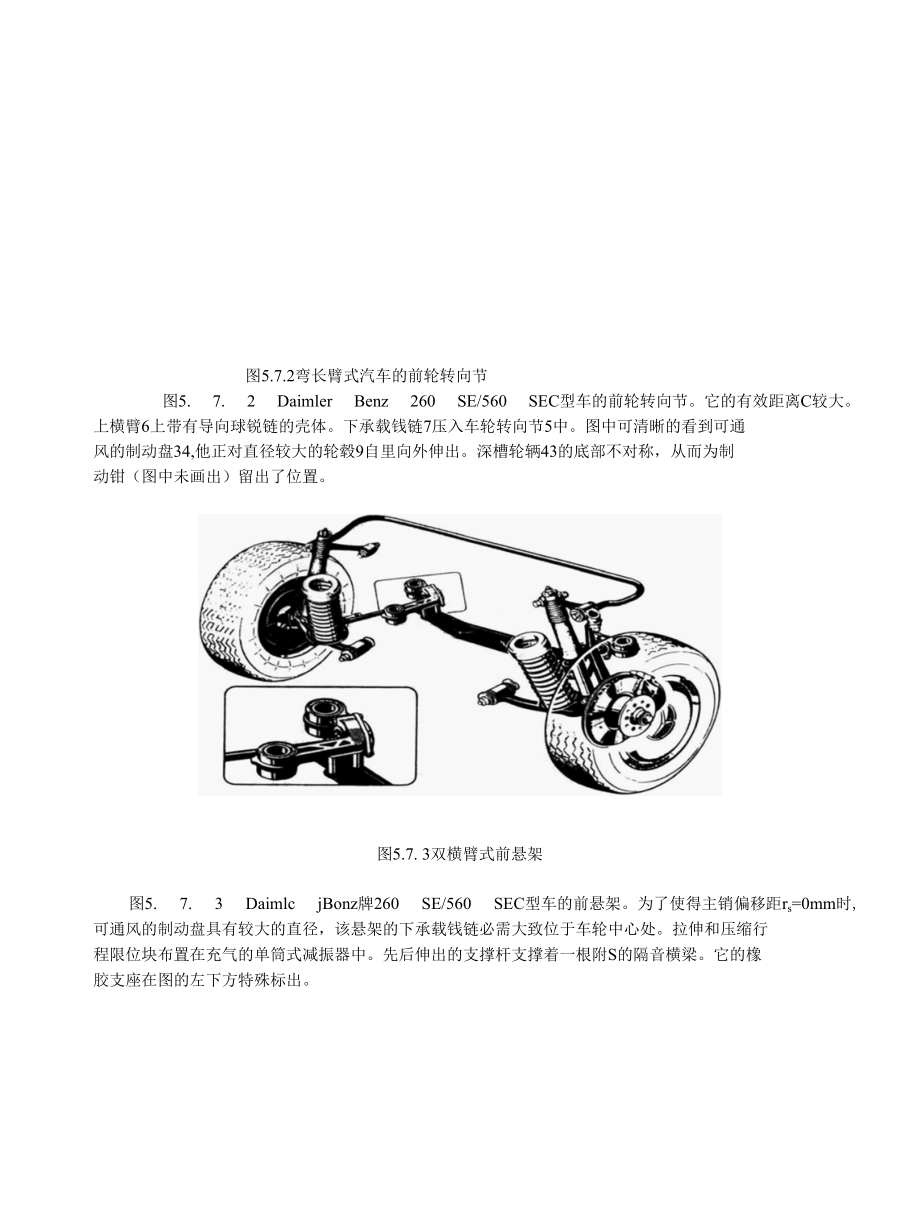
2、距变化。当双横臂较短时,车轮上跳导致外倾角沿负值方向变化而车轮下落时导致外倾角沿正值方向变化,因此车身侧倾时的外倾变化规律正好与此相反。纵倾中心0,对于前悬架来说,处在车轮后方;而对于后悬架来说,则在车轮前方。假如6置于车轮中心上方,不仅可以获得良好的抗转动纵倾性,而且还会减小驱动桥的启动下沉量。这也是双横臂式悬架愈来愈多地在较高级的轿车中用于后驱动桥的缘由。图5.7.2弯长臂式汽车的前轮转向节图5. 7. 2 Daimler Benz 260 SE/560 SEC型车的前轮转向节。它的有效距离C较大。上横臂6上带有导向球锐链的壳体。下承载钱链7压入车轮转向节5中。图中可清晰的看到可通风的制动
3、盘34,他正对直径较大的轮毂9自里向外伸出。深槽轮辆43的底部不对称,从而为制动钳(图中未画出)留出了位置。图5.7. 3双横臂式前悬架图5. 7. 3 Daimlc jBonz牌260 SE/560 SEC型车的前悬架。为了使得主销偏移距rs=0mm时,可通风的制动盘具有较大的直径,该悬架的下承载钱链必需大致位于车轮中心处。拉伸和压缩行程限位块布置在充气的单筒式减振器中。先后伸出的支撑杆支撑着一根附S的隔音横梁。它的橡胶支座在图的左下方特殊标出。两横臂可使车轮的上下跳动符合所需的运动学特性,并由横臂传力给车身(图5.7.4)。侧向力心产生一个附加力矩。该力矩使得曲线行驶时汽车车身的侧倾度增大
4、./,图5. 7. 4独立悬架的力学模型图5.7.4在前独立悬架中,曲线行驶时的侧向力Fsva在连接车身和车桥的横臂中引起反作用力Fe和Fg。由此在车身的左右侧均产生力矩,这些力矩增大车身的侧倾。不管这种状况如何,为了使得作用在车身和横臂支承处的力较小,并从而使支承中的橡胶件的变形不超出极限范围,应让双横臂式悬架中E点和G点之间的有效距离c尽可能大点。因此PASSAT等新型双横臂悬架采纳较长的转向节上横臂,以便增加c的长度,同时,能提高侧倾中心的高度,以便削减侧倾(角与力矩).摆臂需要用支座支承,这些支座会在载荷作用下变形,并影响悬架刚度;普遍采纳支座中的橡胶件的扭转使得刚度增大。随着车身的侧
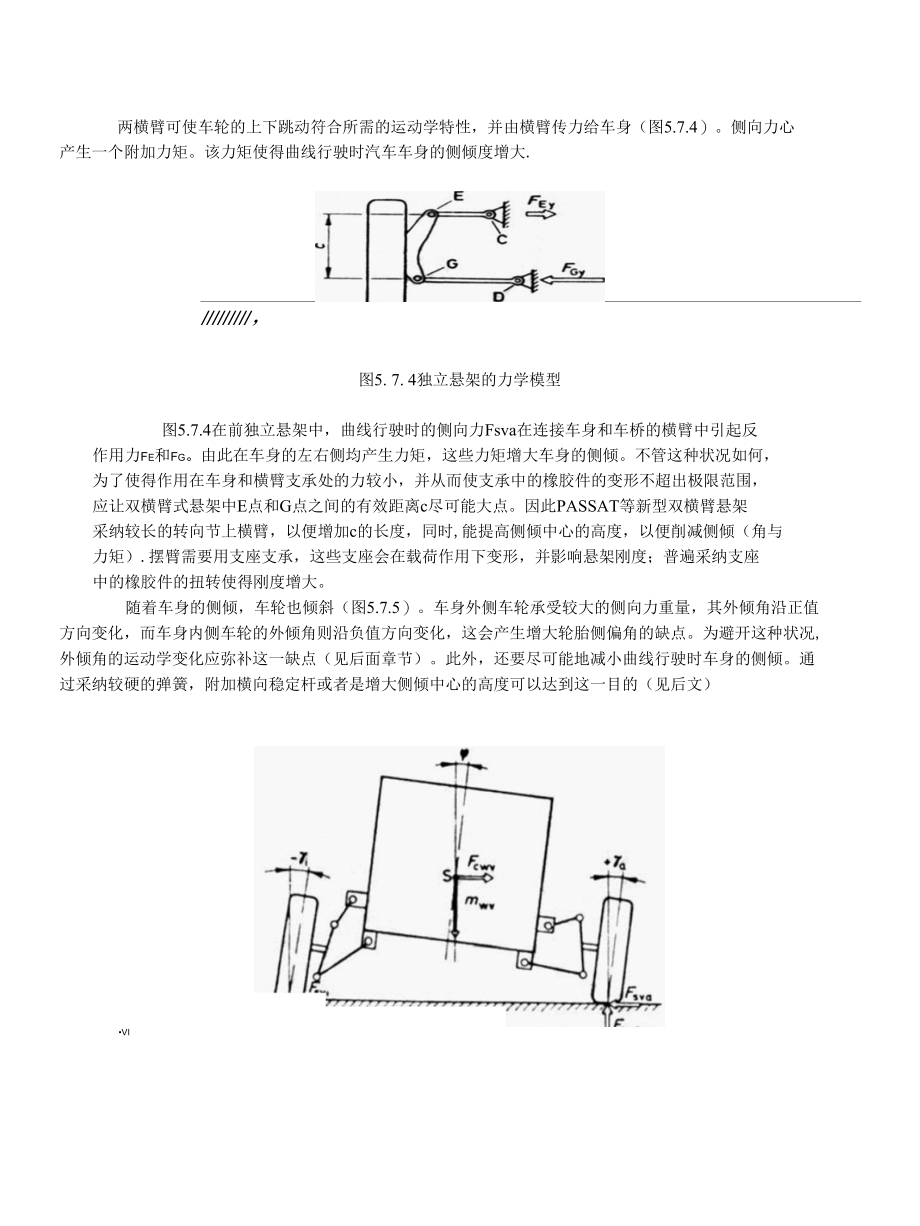
5、倾,车轮也倾斜(图5.7.5)。车身外侧车轮承受较大的侧向力重量,其外倾角沿正值方向变化,而车身内侧车轮的外倾角则沿负值方向变化,这会产生增大轮胎侧偏角的缺点。为避开这种状况,外倾角的运动学变化应弥补这一缺点(见后面章节)。此外,还要尽可能地减小曲线行驶时车身的侧倾。通过采纳较硬的弹簧,附加横向稳定杆或者是增大侧倾中心的高度可以达到这一目的(见后文)VI,0图5. 7. 5曲线行驶中车身侧倾一个角度图5. 7. 5假如曲线行驶中车身侧倾一个角度车身外侧独立悬架的车轮的外倾角变化一个正值十九,而车身内侧车轮的外倾角变化一个负值一八。轮胎的侧偏角增大,从而传递侧倾力Fsa, i的力量下降。;乩是车
6、轮质量安排在前桥上的重量,用,是作用在质心S高度上的离心力。一个车轮下跌,而另一个车轮上跳,即车身两侧车轮“反向跳动”,这时:温a=Rv+Rv ,nvinv- / Fnvo采纳双横臂式悬架,这种悬架在汽车的每一侧均有二根横臂,分别较接在车架、副车架或者是车身上。假如是用作前悬架,则横臂外端通过球校与车轮支架,准确地说是与转向节轴。横臂之间的有效距离C愈大(图5.7.4),作用在横臂及其支承上的力就愈小,即全部构件的变形就愈小,从而车轮的导向性愈精确。5.7.2悬架导向系统设计1总论现在消费者更加盼望他的汽车具有良好的操纵性能,影响汽车的操纵性能且彼此之间必需能相互很好的适应。不管怎么说,与运动
7、学和弹性运动学的性质(侧倾中心、操纵性能、刹车和牵引抗倾以及转向几何图形)相比悬架类型的适当选择的内容要少得多。依据5. 7. 2悬架运动学及弹性运动学的应用基础上,导向杆系的设计直接影响悬架性能.2悬架设计硬点的确定依据5. 7. 2悬架弹性运动学理论确定悬架的定位参数及曲线,可以初步确定悬架设计的定位参数,依据总布置设计的轮距和轴距及整车质量参数进行悬架结构设计.选定车轮轮毂尺寸型号后便可初步确定制动器及转向节的重要尺寸,这些尺寸也是重要的设计硬点,悬架摇臂内较链坐标位置要考虑车架纵梁的宽度,一般副车架调孔用弹性元件与车身总梁的孔位协作,因此悬架摇臂内孔坐标离纵梁比较近,太靠近汽车中心线,



- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 双横臂 悬架 设计
 第一文库网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
第一文库网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 调和油系列产品项目可行性研究报告.doc
调和油系列产品项目可行性研究报告.doc
-
三相调压器项目可行性研究报告.doc
-
可行性分析报告设立XX基金管理公司项目可行性分析报告.doc
-
丁硅料项目可行性研究报告.doc
-
二手车交易市场建设项目可行性研究报告.doc
-
二手车交易市场项目可行性研究报告.doc
-
二万头商品猪项目可行性研究报告大纲2.doc
-
二氢松油醇项目可行性研究报告.doc
-
二氧化钛项目可行性研究报告.doc
-
二位五通电磁换向阀项目可行性研究报告.doc
-
二聚酸项目可行性研究报告.doc
-
从化项目可行性报告XXXX329.doc
-
二氧化碳回收项目可行性研究报告.doc
-
水性油墨工程技术研发中心项目可行性研究报告.doc
-
水杀菌消毒项目可行性研究报告.doc
-
水稻种植及加工产业化项目可行性报告.docx
-
水暖五金配件项目可行性研究报告.doc
-
汽车行业-汽车教学整车模型项目可行性研究报告.doc
-
汽车行业-汽车电机零部件项目可行性研究报告.doc
-
汽车行业-汽车空调压缩机支架项目可行性研究报告.doc
-
汽车行业-汽车轮钢项目可行性研究报告摩森咨询·专业编写可行性.doc
-
水果筛选项目可行性研究报告.doc
-
水质改良剂项目可行性研究报告.doc
-
汽车行业-汽车空调电器总成项目可行性研究报告.doc
-
汽车行业-汽车钢卷项目可行性研究报告.doc
-
水泥厂项目可行性研究报告.docx
-
江苏省某幼儿园学校配套停车场项目建议书(代可行性研究报告).docx
-
水泥预制件墙板项目可行性研究报告.doc
-
江西省金韵生态农业示范园建设项目可行性研究报告页(1).docx
-
汽车行业-汽车美容护理用品项目可行性研究报告.doc
-
汽车行业-汽车轮胎套筒项目可行性研究报告.doc
-
汽车行业-汽车阀门项目可行性研究报告.doc
-
病态窦房结综合征.docx
-
白酒销售人员培训学习心得2023【5篇】.docx
-
百日誓师学生发言稿范文.docx
-
监控系统设备安装步骤.docx
-
监督执纪问责情况对照检查材料(14篇).docx
-
福州市市级机关公开遴选公务员报名推荐表.docx
-
百事汇通快递公司司机管理制度.docx
-
监控系统存储空间计算.docx
-
监督全过程操作分工示意图(适合标准模式安监机构)模板.docx
-
短篇酒店实习心得体会[5篇].docx
-
福建省全省一体化公共数据体系总体架构.docx
-
窗口服务管理规范.docx
-
竣工验收合格报告_2.docx
-
窦性停搏诊疗常规.docx
-
监控系统施工物资准备.docx
-
竣工验收报告(4-20#楼)新1.docx
-
监督工作总体流程图模板.docx
-
第17讲_无形资产的后续计量(2)无形资产的处置.docx
-
短线炒股的抄底方法.docx

